Ce TP vise deux objectifs : vous familiariser avec la description d'un systĶme par un automate temporisķ, vous faire dķcouvrir l'outil de vķrification UPPAAL. Il est fortement inspirķ des exemples fournis comme exemples pour illustrer l'usage du Model-Checker.
Une copie d'UPPAAL se trouve dans l'archive uppaal.tar.gz.
Une fois dķcompressķ, vous pouvez lancer le programme principal
par la commande suivante java -jar uppaal.jar.
Pour commencer, chargez le systĶme dķcrit dans le fichier Etude de cas 1 (File -> Open System). Cette ķtude de cas est une modķlisation d'un contr¶leur d'accĶs assez Ó une variable partagķe. Cette modķlisation reste simpliste car nous ne modķlisons pas la file d'attente des processus cherchant Ó acquķrir la ressource. Dans notre modĶle, tant que les processus n'ont pas la possibilitķ d'acquķrir la ressource, ces derniers restent dans l'ķtat "Safe". Nous allons poursuivre la description du modĶle en dķtaillant chaque ķlķment et son r¶le.
Nous allons dķtailler la sķmantique de chacun des deux types d'automates. Cette description est destinķe Ó renforcer la prķsentation des automates temporisķs faŅte en cours.
Un modĶle UPPAAL est constituķ de 3 parties : Des dķclarations de constantes et des canaux de communications, la dķclaration des automates, et la dķclaration des composants du systĶme ķtudiķ.
SI l'on prend l'exemple du projet RcontrolA.xml, la constante N dķfinie dans la section Projet est utilisķe pour borner la taille du systĶme ķtudiķ
Cette section contient aussi la dķclaration des canaux de communication get de 0 jusqu'Ó N-1.
La section Template contient la description du comportement d'un "composant" du systĶme sous la forme d'un automate temporisķ. Un automate temporisķ est une extension d'une machine Ó ķtat finie. La structure de base de l'automate reste un graphe dķcrivant des chemins d'exķcution possibles.
Les noeuds sont appelķs des lieux ou 'locations' en anglais. L'un de ces lieux est identifiķ comme le lieu initial d'o∙ dķmarre toute exķcution de l'automate (double cerclage). L'espace d'ķtat de l'automate est ķtendu par un ensemble de variables dķclarķe dans la section "Declarations" de chaque partie du modĶle. Il existe trois types primitifs relativement incontournables : les horloges, les entiers et les boolķens.
Le type d'une variable peut Ļtre restreint Ó un sous-domaine de son type de base : int[0,6] reprķsente tous les entiers entre 0 et 6.
///// Dķclaration au niveau Projet (permet de borner le type de systĶme ķtudier
/*
* Exemple de systĶme dķrivķ du case study railroad crossing de UPPAAL
* Dķclaration des identifiants de thread + des canaux entre chaque thread
* et le controleur
*/
const int N = 4; //# threads
typedef int[0,N-1] id_thread;
typedef int[0, N-2] fair_thread;
chan get[N], release; // de N canaux indķpendants pour
//l'acquisition et un seul canal pour le retrait
//// Dķclaration au niveau de l'automate Rcontrol
bool lock;
id_thread owner;
clock timeout;
// Put an element at the end of the queue
void Lock_get(id_thread element)
{
owner=element;
lock=true;
}
void Lock_release()
{
lock=false;
}
|
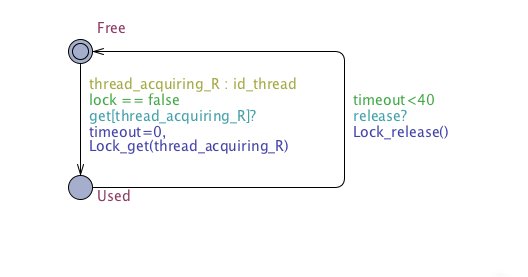
Sur la figure ci-dessous :
Free et Used.
Free
evt ! signifie un envoi, evt ? une rķception.
thread_acquiring_R dont la valeur est parmi 0 ... N-2. Ce sķlecteur va nous permettre de savoir quel automate Thread est en train de prendre la ressource.
Allez dans la section simulation et animez l'automate en cliquant sur le bouton next.
Vous pouvez consulter une description plus dķtaillķ de la syntaxe des architectures de systĶmes dans la section systĶme de l'aide intķgrķe au logiciel.
Uppaal fournit principalement deux services : un service de simulation, et un service de vķrification de propriķtķs.
Chaque service est accessible par l'onglet associķ au centre de la fenĻtre du logiciel.
Avant de pouvoir passer aux phases de simulation ou vķrification, l'outils procĶde Ó une vķrification de la cohķrence du modĶle qui va au delÓ de la simple cohķrence syntaxique puisque l'outils vķrifie aussi que les canaux de communication sont correctement connectķs.
La phase de simulation permet d'animer l'exķcution du systĶme Ó partir des diffķrents ķtats initiaux du systĶme. Ce mode est intķressant puisqu'il permet l'exploration des comportements possible du systĶme et permet d'enregistrer les traces "d'intķrĻt".
Le service de vķrification permet, quant Ó lui de faciliter la preuve de propriķtķs exprimķes en logique temporelle sur les ķtats de l'automate.
La notation est lķgĶrement diffķrente de celle vu en cours puisque la logique manipulķe par UPPAAL est lķgĶrement plus expressive. UPPAAL utilise la logique CTL et des formules sur les horloges pour exprimer des contraintes comportementales sur les systĶmes temps-rķel. (CTL: computational Tree Logic).
Cette logique permet de raisonner non pas sur une trace mais sur toutes les traces possibles.
On distingue les opķrateurs de branche (A et E) des opķrateurs temporels <> et [].
Nous vous donnons les interprķtations pratique de chaque opķrateur, puis leur intķprķtation formelle sur l'ensemble des chemins d'exķcution C parcourables depuis un ķtat s dans un automate donnķ :
La liste complĶte des propriķtķs d'ķtat que vous pouvez spķcifier est dķcrite dans l'aide d'UPPAAL. Notez l'existence d'un prķdicat relativement important "deadlock" qui permet de tester si une architecture peut se bloquer (se placer dans un ķtat Ó partir duquel plus aucune transition n'est tirable.
ouvrez le fichier Rcontrol-Queries.q qui contient deux formules exprimķes dans la logique de l'outil. Un commentaires est associķ Ó chaque formule pour vous aider Ó en comprendre le sens.
Le premier exercice vise Ó poursuivre la prise en main de l'outil UPPAAL et vous faire rķflķchir sur l'utilisation d'un model-checker.
L'ensemble du systĶme dķcrit deux thread qui accĶdent Ó la ressource partagķe en exclusion mutuelle l'un de l'autre. Nous avons dķfini deux formules Ó vķrifier sur ce systĶme.
Rķaliser la vķrification de ces formules. Si une formule est fausse servez vous du simulateur pour trouver une trace pouvant servir de contre exemple. (L'outil de diagnostic vous permet de sķlectionner les transitions tirables au fur et Ó mesure. Une transition spķciale indique le risque de verrouillage du systĶme.
Il est possible de contrainte d'avantage la dynamique des automates en forńant l'automate Ó sortir d'un lieu donnķ. Les invariants de lieux permettent de borner la valeur maximale acceptable pour des horloges choisies. Vous pouvez dķfinir un tel invariant en double cliquant sur un lieu de l'automate.
Utilisez un invariant pour vous assurer que votre systĶme ne risque plus de verrouillage.
Ce modĶle de contr¶leur fonctionne en supposant que les thread "jouent" la rĶgle du jeu et ne tentent pas de pousser le contr¶leur Ó penser, Ó tort, que la ressources et de nouveau libre.
Notez la prķsence d'un deuxiĶme type de thread dans la description du projet. Allez dans la section "System declarations" pour commenter la premiĶre ligne et dķcommenter la seconde. La seconde ligne correspond Ó une autre architecture.
Modifiez le modĶle du second type de thread pour ķviter le verrouillage de la mĻme maniĶre que pour les autres thread. (Attention l'ķtat Process Ó deux transition entrante cette fois-ci).
Ce modĶle de thread a une particularitķ propre au modĶle d'automates temporisķs d'UPPAAL : les lieux dit urgents. Il faut les voir comme des ķtats o∙ il est impossible au systĶme d'attendre. Ainsi, toutes les valeurs d'horloges sont bloquķes. Soit une transition est franchissable soit l'automate est bloquķ.
Vous devez Ļtre capable de comprendre la signification des transitions rajoutķes. Que se passe-t-il lorsque ce thread a attendu plus de 100 unitķs de temps dans l'ķtat Safe ?
Ce scķnario n'est pas totalement factice puisque les mutuxes POSIX peuvent Ļtre utilisķs de telle sorte qu'un thread peut dķverrouiller un verrou sans l'avoir pris au prķalable.
Revķrifiez les propriķtķs associķes au modĶle
Modifiez le modĶle pour que l'on soit capable d'identifier l'ķmetteur de l'ķvķnement release. A partir de la, vous pourrez utiliser une garde pour vous assurer que seul le dķtenteur de la ressource puisse la libķrer lorsqu'elle est utilisķe. Complķtez l'ensemble du modĶle pour que la propriķtķ 1 soit Ó nouveau vraie.
GrŌce Ó la possibilitķ de dķfinir des variables internes aux automates, il est possible de reprķsenter un mķcanisme de contr¶le d'accĶs lķgĶrement plus rķaliste : une file d'attente FIFO. La description de ce mķcanisme est dans le fichier RcontrolB.xml
Consultez le section Project -> Declaration pour identifier les nouveaux canaux de communication (en particulier entre la file et le gestionnaire de la ressource.
Le principe de la file d'attente est le suivant :
Vķrifiez la propriķtķ 1. Quelle erreur a ķtķ commise ? Combien les thread devraient ils avoir de lieux bien distincts ?.
Indice : est ce que le thread possĶde rķellement la ressource juste aprĶs avoir fait get ! ?
Modifiez l'architecture du systĶme pour mettre en place une description plus adaptķe du comportement des threads. Vķrifiez votre conception.