Accurate Multi-View Reconstruction
Using Robust Binocular Stereo and Surface Meshing
Derek Bradley, Tamy Boubekeur, Wolfgang Heidrich
Using Robust Binocular Stereo and Surface Meshing
CVPR 2008 - Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition
Abstract
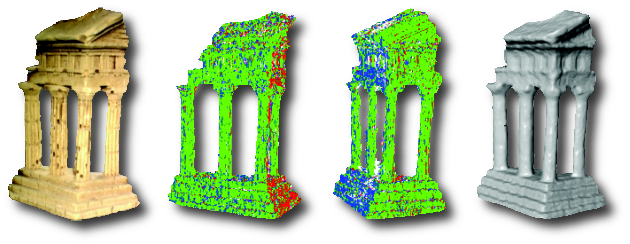
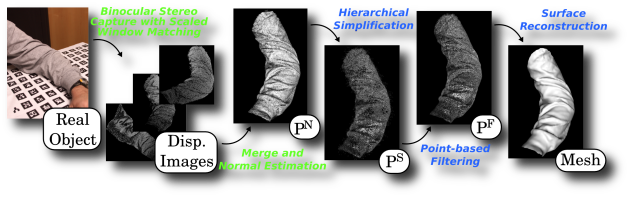
This paper presents a new algorithm for multi-view reconstruction that demonstrates both accuracy and efficiency. Our method is based on robust binocular stereo matching, followed by adaptive point-based filtering of the merged point clouds, and efficient, high-quality mesh generation. All aspects of our method are designed to be highly scalable with the number of views. Our technique produces the most accurate results among current algorithms for a sparse number of viewpoints according to the Middlebury datasets. Additionally, we prove to be the most efficient method among non-GPU algorithms for the same datasets. Finally, our scaled-window matching technique also excels at reconstructing deformable objects with high-curvature surfaces, which we demonstrate with a number of examples.
Downloads
![]()
Related ressources
 | |
|
| |
 | |
|
| |
 | |
|
|
More ressources here.